|
|
| MOQ: | 1 |
| Prezzo: | 1500$ |
| imballaggio standard: | 169 cm (A), 75 cm (L), 30 cm (L) |
| Periodo di consegna: | 1 mese |
| Capacità di approvvigionamento: | 99 unità |
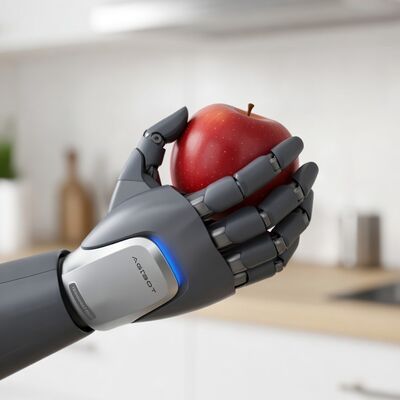
La Nuova Mano Robotica Umanoide a Cinque Dita AGIBOT OmniHand Pro 2025 è un effettore terminale robotico avanzato progettato per imitare il movimento della mano umana con precisione e flessibilità. Questa mano robotica a cinque dita supporta il movimento coordinato delle dita, una presa ad alta precisione e un feedback di forza intelligente per compiti di manipolazione complessi.
OmniHand Pro 2025 è adatta per robot umanoidi, robot di servizio, piattaforme di ricerca e bracci robotici industriali che richiedono un movimento naturale della mano, una gestione adattiva degli oggetti e un'interazione sicura uomo-robot.
Ogni dito può muoversi indipendentemente per eseguire una presa e una manipolazione naturali simili al movimento della mano umana.
I sensori di forza e tattili integrati consentono un controllo adattivo della presa in base alla forma, al peso e alla fragilità dell'oggetto.
Il controllo fluido e preciso di più giunti supporta la gestione delicata e i compiti di manipolazione complessi.
Algoritmi di controllo digitale avanzati consentono un movimento reattivo e una regolazione in tempo reale per un funzionamento stabile.
Supporta l'integrazione con robot umanoidi, bracci robotici e robot di servizio tramite interfacce di comunicazione e montaggio standard.
Le opzioni di configurazione flessibili consentono la personalizzazione per compiti specifici o sistemi robotici.
| Articolo | Specifiche |
|---|---|
| Tipo di prodotto | Mano robotica umanoide a cinque dita |
| Gradi di libertà | Dita indipendenti multi-giunto |
| Metodo di controllo | Controllo digitale intelligente |
| Rilevamento | Feedback di forza e tattile |
| Compatibilità | Robot umanoidi e bracci robotici |
| Comunicazione | Interfacce robotiche standard |
| Integrazione | Montaggio e controllo modulari |
| Alimentazione | Sistema esterno alimentato |
| Ambiente operativo | Spazi industriali e di ricerca interni |
Le specifiche possono variare a seconda della configurazione.
AGIBOT OmniHand Pro 2025 combina un design meccanico simile a quello umano con rilevamento e controllo intelligenti per supportare la prossima generazione di robot umanoidi e piattaforme robotiche avanzate. Offre una manipolazione ad alte prestazioni e una maggiore flessibilità per le applicazioni future.
È una mano robotica umanoide a cinque dita progettata per la manipolazione avanzata e il movimento simile a quello umano nella robotica.
Sì. Supporta l'integrazione con robot umanoidi, bracci robotici e robot di servizio utilizzando interfacce standard.
Può eseguire la presa, la gestione, la manipolazione di oggetti e compiti delicati che richiedono precisione e controllo adattivo.
Sì. I sensori di forza e tattili integrati consentono il controllo adattivo della presa in base al feedback di contatto.
Sì. È ampiamente utilizzata nei laboratori di ricerca sull'intelligenza artificiale e sulla robotica e negli ambienti didattici per studi di manipolazione avanzati.
Sì. Il suo design modulare consente la personalizzazione per diverse applicazioni e requisiti di sistema.
|
|
| MOQ: | 1 |
| Prezzo: | 1500$ |
| imballaggio standard: | 169 cm (A), 75 cm (L), 30 cm (L) |
| Periodo di consegna: | 1 mese |
| Capacità di approvvigionamento: | 99 unità |
La Nuova Mano Robotica Umanoide a Cinque Dita AGIBOT OmniHand Pro 2025 è un effettore terminale robotico avanzato progettato per imitare il movimento della mano umana con precisione e flessibilità. Questa mano robotica a cinque dita supporta il movimento coordinato delle dita, una presa ad alta precisione e un feedback di forza intelligente per compiti di manipolazione complessi.
OmniHand Pro 2025 è adatta per robot umanoidi, robot di servizio, piattaforme di ricerca e bracci robotici industriali che richiedono un movimento naturale della mano, una gestione adattiva degli oggetti e un'interazione sicura uomo-robot.
Ogni dito può muoversi indipendentemente per eseguire una presa e una manipolazione naturali simili al movimento della mano umana.
I sensori di forza e tattili integrati consentono un controllo adattivo della presa in base alla forma, al peso e alla fragilità dell'oggetto.
Il controllo fluido e preciso di più giunti supporta la gestione delicata e i compiti di manipolazione complessi.
Algoritmi di controllo digitale avanzati consentono un movimento reattivo e una regolazione in tempo reale per un funzionamento stabile.
Supporta l'integrazione con robot umanoidi, bracci robotici e robot di servizio tramite interfacce di comunicazione e montaggio standard.
Le opzioni di configurazione flessibili consentono la personalizzazione per compiti specifici o sistemi robotici.
| Articolo | Specifiche |
|---|---|
| Tipo di prodotto | Mano robotica umanoide a cinque dita |
| Gradi di libertà | Dita indipendenti multi-giunto |
| Metodo di controllo | Controllo digitale intelligente |
| Rilevamento | Feedback di forza e tattile |
| Compatibilità | Robot umanoidi e bracci robotici |
| Comunicazione | Interfacce robotiche standard |
| Integrazione | Montaggio e controllo modulari |
| Alimentazione | Sistema esterno alimentato |
| Ambiente operativo | Spazi industriali e di ricerca interni |
Le specifiche possono variare a seconda della configurazione.
AGIBOT OmniHand Pro 2025 combina un design meccanico simile a quello umano con rilevamento e controllo intelligenti per supportare la prossima generazione di robot umanoidi e piattaforme robotiche avanzate. Offre una manipolazione ad alte prestazioni e una maggiore flessibilità per le applicazioni future.
È una mano robotica umanoide a cinque dita progettata per la manipolazione avanzata e il movimento simile a quello umano nella robotica.
Sì. Supporta l'integrazione con robot umanoidi, bracci robotici e robot di servizio utilizzando interfacce standard.
Può eseguire la presa, la gestione, la manipolazione di oggetti e compiti delicati che richiedono precisione e controllo adattivo.
Sì. I sensori di forza e tattili integrati consentono il controllo adattivo della presa in base al feedback di contatto.
Sì. È ampiamente utilizzata nei laboratori di ricerca sull'intelligenza artificiale e sulla robotica e negli ambienti didattici per studi di manipolazione avanzati.
Sì. Il suo design modulare consente la personalizzazione per diverse applicazioni e requisiti di sistema.