|
|
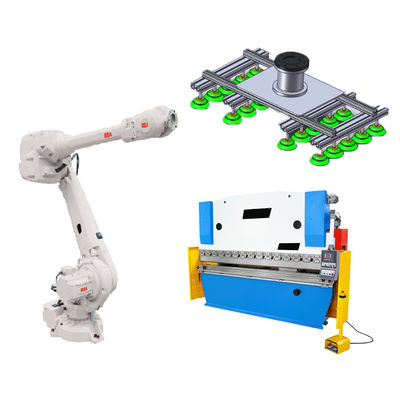
Robot di CNC del braccio IRB4600 del robot di ABB con la pinza di presa elettrica per il lavoro del posto e della scelta con la macchina piegatubi
| Versione del robot | Ripetibilità RP (millimetri) di posizione | Ripetibilità RT (millimetro) del percorso * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Versioni del robot | Portata (m) | Carico utile (chilogrammi) | Armload (chilogrammi) | |
| IRB 4600 60/2.05 | 2,05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2,05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2,55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2,51 | 20 | 11 | |
| Numero delle asce | 6+3 esterni (fino a 36 con MultiMove) | |||
| Protezione | IP67 standard, come fonderia di opzione più 2 | |||
| Montaggio | Pavimento, scaffale, invertito o inclinato | |||
| Regolatore | Singolo gabinetto IRC5, | |||
|
|
Robot di CNC del braccio IRB4600 del robot di ABB con la pinza di presa elettrica per il lavoro del posto e della scelta con la macchina piegatubi
| Versione del robot | Ripetibilità RP (millimetri) di posizione | Ripetibilità RT (millimetro) del percorso * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Versioni del robot | Portata (m) | Carico utile (chilogrammi) | Armload (chilogrammi) | |
| IRB 4600 60/2.05 | 2,05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2,05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2,55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2,51 | 20 | 11 | |
| Numero delle asce | 6+3 esterni (fino a 36 con MultiMove) | |||
| Protezione | IP67 standard, come fonderia di opzione più 2 | |||
| Montaggio | Pavimento, scaffale, invertito o inclinato | |||
| Regolatore | Singolo gabinetto IRC5, | |||